
Rで 線形代数:行列式 を確認します。
1. 行列式(Determinant)とは
定義
行列式とは、正方行列にのみ定義される、その行列の性質を要約する一つのスカラー値です。行列 A の行列式は det(A) または |A| と表記されます。
例えば、2×2行列 A = [[a, b], [c, d]] の行列式は以下のように計算されます。
det(A) = ad - bc
幾何学的な意味:面積や体積の変化率
行列式の概念の1つは、「線形変換による面積や体積の変化率」です。
行列はベクトルに対する「線形変換(回転、拡大・縮小、せん断など)」と見なせます。この変換によって、元の図形がどれだけ拡大または縮小されたか、その倍率を行列式が示します。
- 2×2行列の場合: 単位正方形(基底ベクトル
(1,0)と(0,1)が作る面積1の正方形)が、行列によって変換された後にできる平行四辺形の面積が行列式の絶対値|det(A)|になります。 - 3×3行列の場合: 単位立方体(基底ベクトル
(1,0,0),(0,1,0),(0,0,1)が作る体積1の立方体)が、行列によって変換された後にできる平行六面体の体積が行列式の絶対値|det(A)|になります。
行列式の符号の意味
行列式の値だけでなく、その符号(プラスかマイナスか)にも意味があります。
-
det(A) > 0(正の値): 空間の「向き」を維持したまま変換されます(例:回転、拡大)。 -
det(A) < 0(負の値): 空間の「向き」が反転して変換されます(例:鏡で映したように裏返る)。 -
det(A) = 0(ゼロ): 空間が「潰れて」しまいます。- 2次元なら線や点に、3次元なら平面や線、点になります。
- これは、変換によって次元が減少したことを意味します。
性質と応用
逆行列の存在条件:
det(A) ≠ 0⇔ 行列Aは正則で、逆行列A⁻¹が存在する行列式が0ということは空間が潰れてしまっている状態なので、元の空間に戻すような逆変換(逆行列)は存在し得ません。行列式が0でない場合にのみ、逆変換が可能です。
積の行列式:
det(AB) = det(A) × det(B)「変換Bを行った後、変換Aを行う」という合成変換の拡大率は、「変換Aの拡大率」と「変換Bの拡大率」の積になります。
転置行列の行列式:
det(Aᵀ) = det(A)転置しても、面積や体積の変化率は変わりません。
2. Rによるシミュレーション
Rでは det() 関数を使って行列式を計算できます。ここでは、計算だけでなく、幾何学的な意味も可視化してみます。
Rコード
# --------------------------------------------------
# 行列式のシミュレーション
# --------------------------------------------------
# --- シナリオ1: 基本的な計算と逆行列との関係 ---
cat("--- シナリオ1: 基本的な計算と逆行列との関係 ---\n")
# (a) 正則行列の場合
A <- matrix(c(3, 1, 2, 2), nrow = 2)
cat("正則行列 A:\n")
print(A)
det_A <- det(A)
cat("Aの行列式 det(A):", det_A, "\n")
cat("手計算: 3*2 - 1*2 =", 3 * 2 - 2 * 1, "\n")
cat("→ 行列式が0ではないので、逆行列は存在する。\n")
# 実際に逆行列を計算してみる
print(solve(A))
# (b) 特異行列の場合
B <- matrix(c(1, 2, 2, 4), nrow = 2)
cat("\n特異行列 B:\n")
print(B)
det_B <- det(B)
cat("Bの行列式 det(B):", det_B, "\n")
cat("→ 行列式が0なので、逆行列は存在しません。\n")
# solve(B) を実行するとエラーになる
result <- tryCatch(
{
solve(B)
},
error = function(e) {
return(e) # エラーオブジェクトを返す
}
)
print(result$message)
cat("\n\n")
# --- シナリオ2: 幾何学的な意味の可視化 ---
cat("--- シナリオ2: 幾何学的な意味の可視化 ---\n")
# 描画用の関数を定義
plot_transform <- function(M) {
# 元の単位正方形の頂点(ポリゴン描画用に始点を末尾に追加)
square_orig_poly <- rbind(c(0, 0), c(1, 0), c(1, 1), c(0, 1), c(0, 0))
# 行列Mで頂点を変換
square_transformed_poly <- t(M %*% t(square_orig_poly))
# 元の基底ベクトル e1=(1,0), e2=(0,1)
e1 <- c(1, 0)
e2 <- c(0, 1)
# 変換後の基底ベクトル v1, v2
v1 <- M %*% e1
v2 <- M %*% e2
# 描画範囲を、元の図形と変換後の図形の両方が収まるように自動調整
all_points <- rbind(square_orig_poly, square_transformed_poly)
max_val <- max(abs(all_points)) * 1.2
plot(NULL,
xlim = c(-max_val, max_val), ylim = c(-max_val, max_val),
xlab = "x", ylab = "y", asp = 1,
main = paste("Determinant (det) =", round(det(M), 2))
)
# 軸線を追加
abline(h = 0, v = 0, lty = 2, col = "grey")
# 1. 元の単位正方形を描画 (半透明の薄い青)
polygon(square_orig_poly, col = "#AAAAFF80", border = "blue")
# 2. 変換後の平行四辺形を描画 (半透明の薄い赤)
polygon(square_transformed_poly, col = "#FFAAAA80", border = "red")
# 3. 元の基底ベクトルを点線の矢印で描画
arrows(0, 0, e1[1], e1[2], col = "blue", lty = 2, lwd = 2.5, length = 0.1)
arrows(0, 0, e2[1], e2[2], col = "red", lty = 2, lwd = 2.5, length = 0.1)
# 4. 変換後の基底ベクトルを実線の矢印で描画
arrows(0, 0, v1[1], v1[2], col = "blue", lwd = 2.5, length = 0.1)
arrows(0, 0, v2[1], v2[2], col = "red", lwd = 2.5, length = 0.1)
# 5. 凡例を追加(元の図形と変換後の図形を区別)
legend("topleft",
legend = c("Original (Area & Vectors)", "Transformed (Area & Vectors)"),
col = c("blue", "red"),
border = c("blue", "red"),
fill = c("#AAAAFF80", "#FFAAAA80"),
lty = c(2, 1),
lwd = 2,
bty = "n",
merge = TRUE
) # merge=TRUE で塗りつぶしと線を結合
}
# (a) 拡大・回転 (det > 0)
M1 <- matrix(c(2, 1, 1, 2), nrow = 2)
cat("行列 M1:\n")
print(M1)
cat("det(M1) =", det(M1), "(面積が3倍になります。Figure 1)\n")
plot_transform(M1)
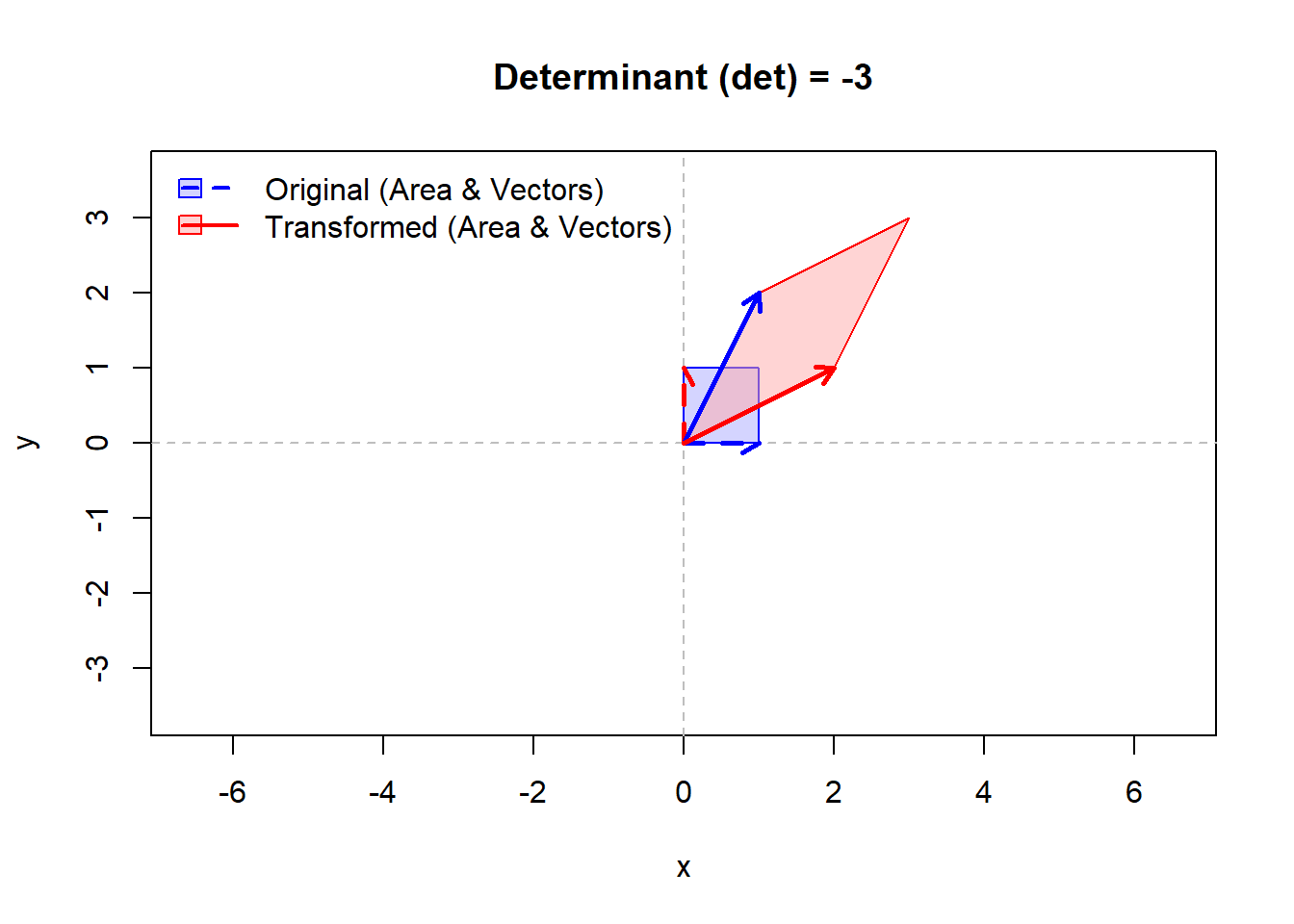
# (b) 向きが反転 (det < 0)
M2 <- matrix(c(1, 2, 2, 1), nrow = 2)
cat("\n行列 M2:\n")
print(M2)
cat("det(M2) =", det(M2), "(面積は3倍になるが、向きが反転します。Figure 2)\n")
plot_transform(M2)
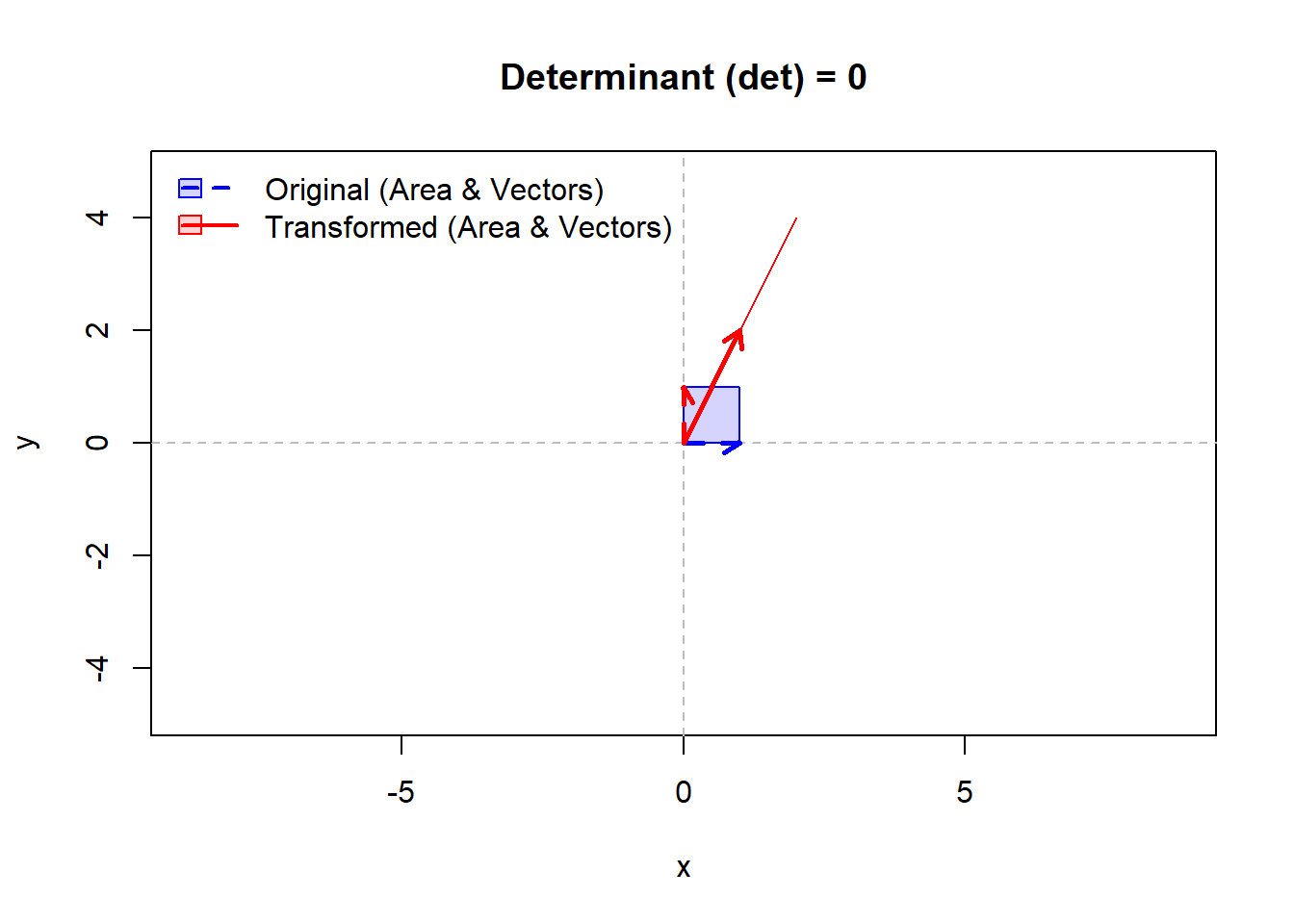
# (c) 空間が潰れる (det = 0)
M3 <- matrix(c(1, 2, 1, 2), nrow = 2)
cat("\n行列 M3:\n")
print(M3)
cat("det(M3) =", det(M3), "(面積が0、つまり直線に潰れます。Figure 3)\n")
plot_transform(M3)
# --- シナリオ3: 性質の確認 det(AB) = det(A) * det(B) ---
cat("\n--- シナリオ3: 性質の確認 ---\n")
A <- matrix(c(2, 0, 1, 3), nrow = 2)
B <- matrix(c(1, 4, 0, 2), nrow = 2)
AB <- A %*% B
det_A <- det(A)
det_B <- det(B)
det_AB <- det(AB)
det_A_times_det_B <- det_A * det_B
cat("det(A) =", det_A, "\n")
cat("det(B) =", det_B, "\n")
cat("det(A) * det(B) =", det_A_times_det_B, "\n")
cat("det(A %*% B) =", det_AB, "\n")
cat("両者は一致するか? ->", all.equal(det_AB, det_A_times_det_B), "\n")--- シナリオ1: 基本的な計算と逆行列との関係 ---
正則行列 A:
[,1] [,2]
[1,] 3 2
[2,] 1 2
Aの行列式 det(A): 4
手計算: 3*2 - 1*2 = 4
→ 行列式が0ではないので、逆行列は存在する。
[,1] [,2]
[1,] 0.50 -0.50
[2,] -0.25 0.75
特異行列 B:
[,1] [,2]
[1,] 1 2
[2,] 2 4
Bの行列式 det(B): 0
→ 行列式が0なので、逆行列は存在しません。
[1] "Lapack routine dgesv: system is exactly singular: U[2,2] = 0"
--- シナリオ2: 幾何学的な意味の可視化 ---
行列 M1:
[,1] [,2]
[1,] 2 1
[2,] 1 2
det(M1) = 3 (面積が3倍になります。Figure 1)
行列 M2:
[,1] [,2]
[1,] 1 2
[2,] 2 1
det(M2) = -3 (面積は3倍になるが、向きが反転します。Figure 2)
行列 M3:
[,1] [,2]
[1,] 1 1
[2,] 2 2
det(M3) = 0 (面積が0、つまり直線に潰れます。Figure 3)
--- シナリオ3: 性質の確認 ---
det(A) = 6
det(B) = 2
det(A) * det(B) = 12
det(A %*% B) = 12
両者は一致するか? -> TRUE 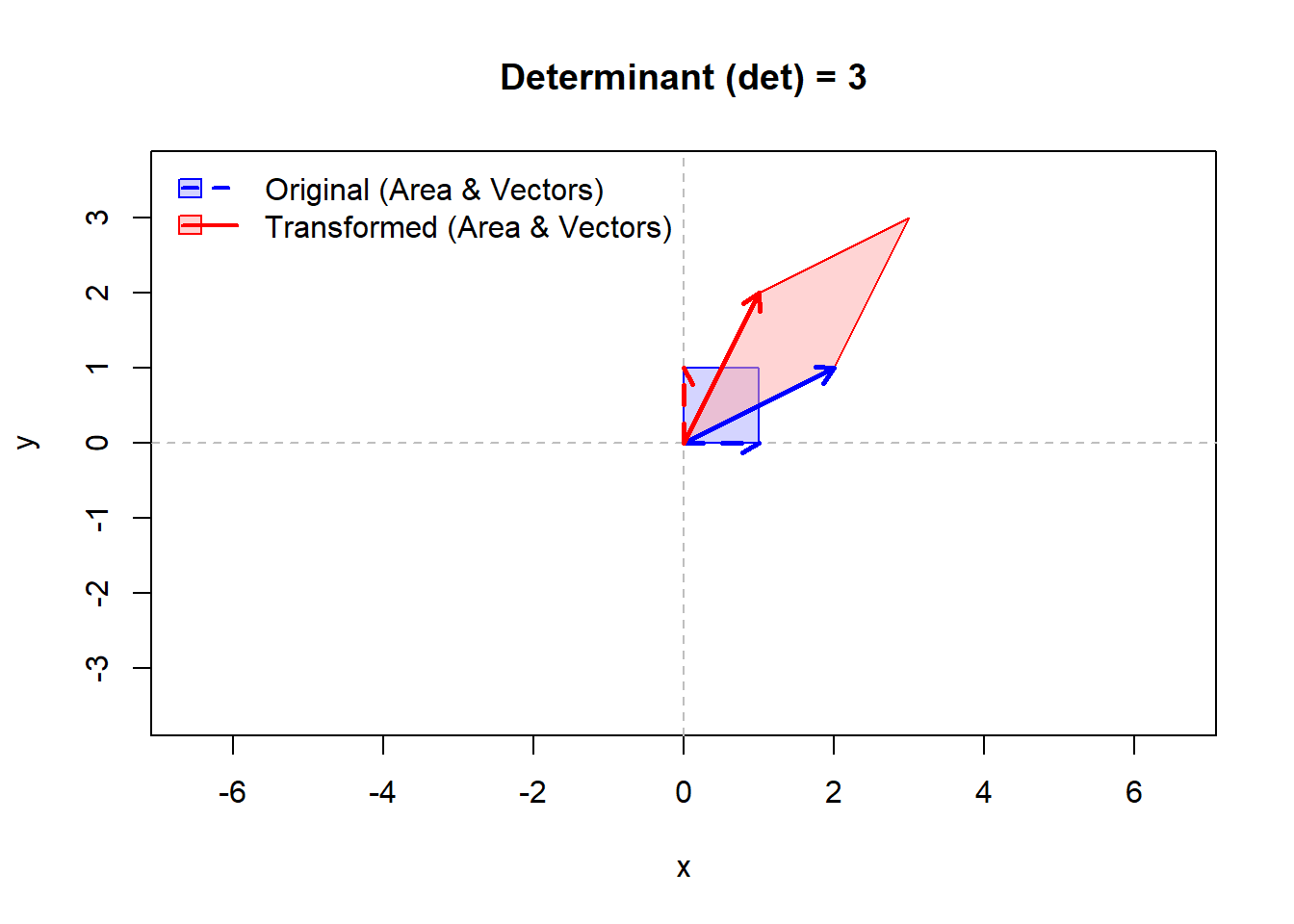
以上です。

